spatial arches / academic / masdfab / 2021
robotic fabrication, material research
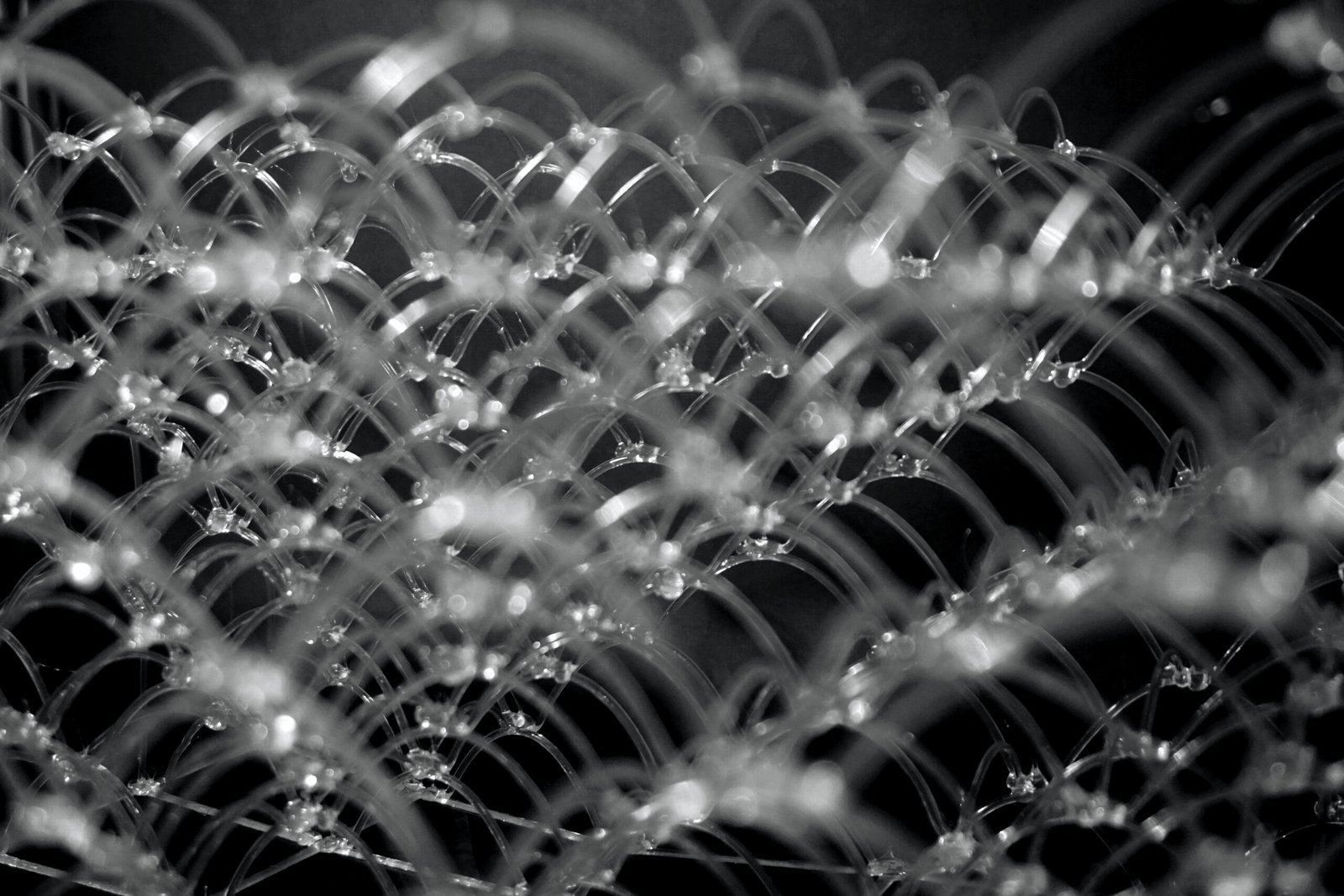
spatial arches is a project that explores robotic control via 3D printing for shapes formed by gravity. Using material behavior to inform geometry, the project uses catenary arches as a unit cell for 3D printed assemblies. Gathering information from a measured dataset, a robotic arm was used to manipulate thermoplastic material into predictable geometries under influence of gravity.
with Wenjun Liu and Vincent Wörndl
All photographs : MAS DFAB ETH Zürich
With gravity as a design driver, spatial arches re-invents ways of 3D printing volumes by introducing a novel method of enhancing production by inversion : a simple change in perception. Can gravity be an influencer in a multi-variable digital fabrication process? Can it lead not only the fabrication process, but also guide the 'how-to' of the design it helps enable?
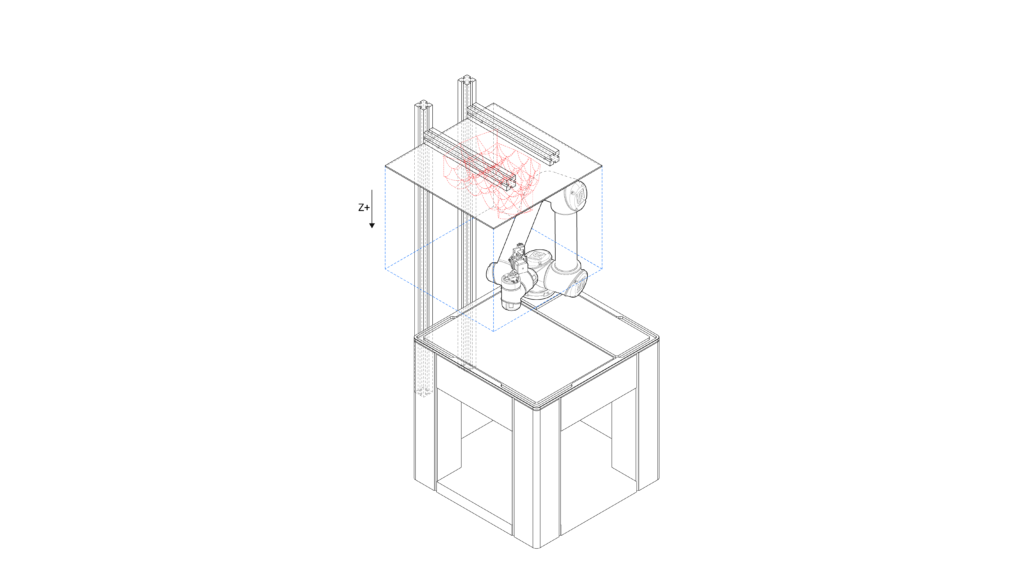

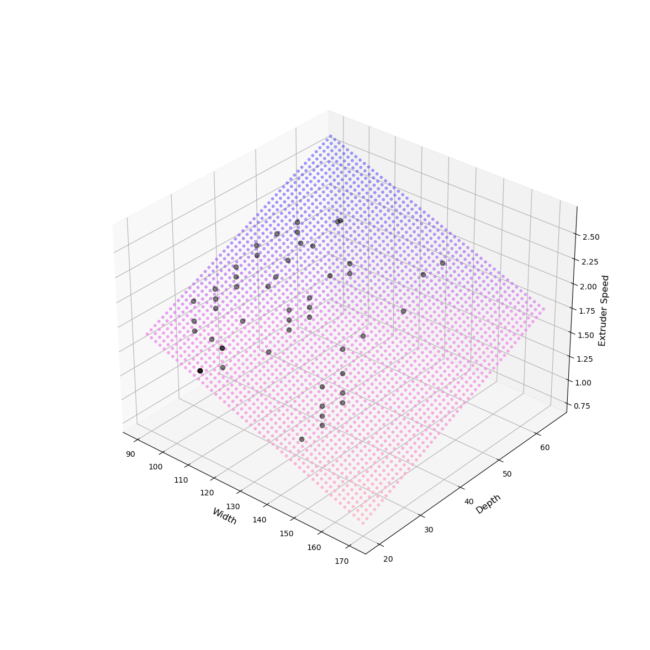
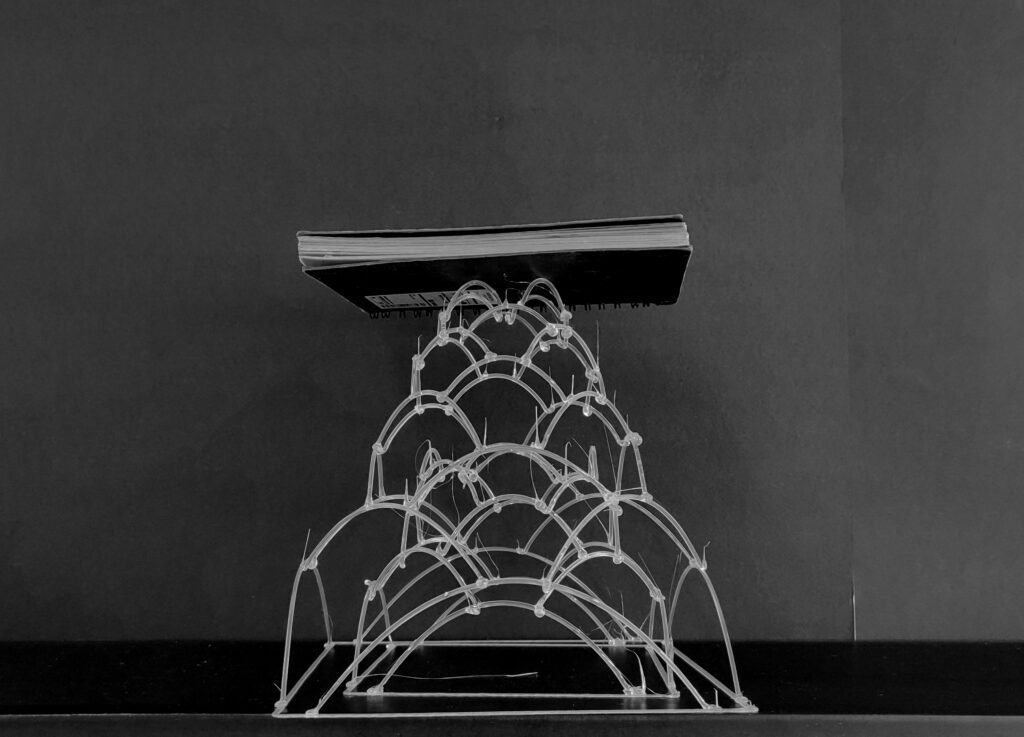
Using a measured dataset, a predictive model was generated to find the best fabrication parameters for a given shape and size of curve. These values were transmitted to the robot as an analog signal which would be updated in real time. A series of different overlaying catenary shapes were designed and printed with feedback from the predictive model and it was determined that arches with a depth of 50mm to 150mm could be predictably fabricated with the current model. To validate the results further, this was further tested on prototypes of varying scale and shapes over a period of two weeks, exploring the potential of these forms to create self standing arched structures, and also exploring 'spatiality' of these multi-layered designs.

All rights reserved, ananya kango 2023